



Autonomna i daljinski upravljana pomorska plovila sve se više dokazuju u zahtjevnim operacijama diljem svijeta — američka mornarica nedavno je takvim plovilom spasila posadu oborenog helikoptera kod Hormuškog tjesnaca. Hrvatska ima vlastiti, neovisno razvijen sustav za podvodnu potragu i izvlačenje, koji se već blizu dvije godine validira u stvarnim uvjetima.
Hrvatski razvojni tim pod imenom Autonomous Crafts razvio je SAROS-X, bezposadni sustav za podvodnu potragu i izvlačenje koji objedinjuje bezposadno površinsko plovilo, podvodni robot i operativni centar na kopnu. Sustav je koncipiran tako da područje pretrage najprije obrade robotske jedinice, dok ronilački tim u vodu ulazi tek nakon što je cilj lociran i potvrđen. Provjeren je u stvarnim uvjetima potražnih vježbi na jezerima, rijekama i moru, a za rujan je najavljena demonstracija zajedničkog djelovanja bezposadnog plovila i ronilice na zadatku izvlačenja eksplozivnih sredstava te potrage za utopljenicima.

U operacijama podvodne potrage i izvlačenja najveća izloženost ljudi nastupa već u fazi pretrage, prije nego što je cilj lociran. Ronioci se spuštaju u hladnu vodu ograničene vidljivosti, nerijetko uz struju, veću dubinu, mulj i opasnost od zaplitanja, dok je trajanje zarona ograničeno fiziološkim čimbenicima. Posljedično se isti tim mora opetovano izmjenjivati kroz jednake uvjete, čime se povećava broj angažiranih ljudi, produljuje trajanje akcije i nakuplja umor upravo u zadaćama koje zahtijevaju najveću preciznost.
SAROS-X je projektiran tako da se prisutnost ljudi u vodi svede na nužni minimum. U prvoj fazi robotski sustavi pretražuju područje sonarom i kamerama, bez ronilaca u vodi. Predmeti koje je moguće izvući vinčom ili hvataljkom podvodnog robota izvlače se neposredno, bez zarona. Ronilački tim za to vrijeme ostaje na obali, u stanju pripravnosti. Tek nakon detekcije i potvrde cilja ronilac se upućuje na precizno određenu i označenu lokaciju, čime se broj zarona i vrijeme provedeno u vodi svode na najmanju mjeru.
Sustav se razvija u suradnji s roniocima i drugim stručnjacima koji takve operacije izvode na terenu, uz uvažavanje stvarnih operativnih zahtjeva i s ciljem najvećega mogućeg smanjenja rizika za ljude.
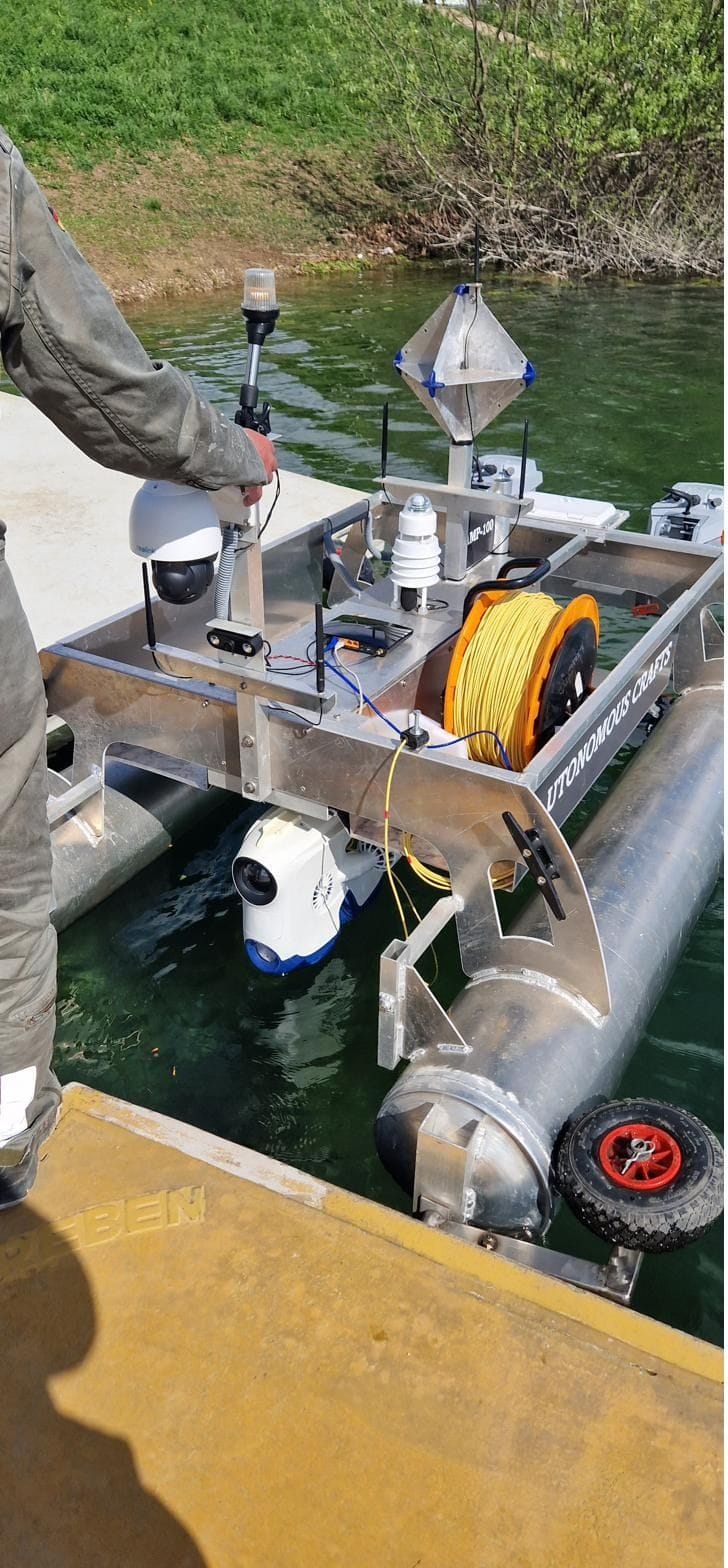
Premda je plovilo najuočljiviji element, riječ je o cjelovitom sustavu. Temelji se na provjerenoj platformi AMP-100 korisne nosivosti do 150 kg i dostupan je u dvjema konfiguracijama: samostalnome bezposadnom plovilu, namijenjenom potrazi i podršci roniocima u uvjetima zadovoljavajuće vidljivosti, te plovilu s združenim podvodnim robotom (ROV), namijenjenom pretrazi i izvlačenju pri dnu u mutnoj vodi. Plovilo je opremljeno površinskom i podvodnom kamerom, sonarom, vinčom za izvlačenje te komunikacijskom vezom putem radija, mobilne ili satelitske mreže. Može djelovati autonomno ili pod potpunim daljinskim upravljanjem; autonomija je pritom jedan od načina rada, a ne svrha sama po sebi.
Misijom upravlja operativni centar na kopnu (AROC), neovisno o njegovoj lokaciji. Sustav je u cijelosti mobilan: prilagođen je cestovnom prijevozu, a porinuće i izvlačenje moguće je s gotovo svake obale ili rampe, bez lučke infrastrukture, dizalice ili pratećeg plovila. Po namjeni i dizajnu razlikuje se od plovila za ekološki nadzor i od naoružanih platformi te je usmjeren na traganje, izvlačenje i podvodnu inspekciju.
Sustav se razvija u smjeru automatske detekcije objekata te podrške odlučivanju koja u stvarnom vremenu prati tijek misije te, na temelju tih podataka i uz pomoć umjetne inteligencije, operateru sugerira sljedeće korake — uz čovjeka koji donosi konačnu odluku.

Sustav se u stvarnim uvjetima razvija i uhodava u misijama već blizu dvije godine, uz ciljanu prilagodbu zahtjevima kritičnih operacija. U jednoj od vježbi potrage i izvlačenja na jezeru lociran je i na obalu izvučen simulirani utopljenik. Vježba je provedena u nepovoljnim uvjetima: dostupni satelitski podaci o terenu nisu odgovarali stvarnoj situaciji, gusta podvodna vegetacija ometala je prikaz sonara, a struja je pomaknula simuliranog utopljenika izvan pretpostavljene zone pretrage. Cilj je unatoč tomu detektiran sonarom i potvrđen podvodnom kamerom na daljinu, ronilački tim je pravodobno obaviješten i naveden, nakon čega su vinčom sigurno izvučeni ronilac i unesrećeni.

Sustav sudjeluje u vježbama i potragama s Hrvatskom gorskom službom spašavanja, primjerice na jezeru Banja i na Dunavu, gdje je locirao i označio potopljene objekte te izvukao ronioca u autonomnom načinu rada, uz nadzor iz operativnog centra u zapovjednom vozilu, a ispitan je i u uvjetima juga do 45 čvorova.

Snimke vježbi i demonstracija dostupne su na YouTube kanalu Autonomous Crafts (@AutonomousCrafts):
Daljnji je razvoj usmjeren prema kolektivnoj robotici — pristupu koji se pomiče s pojedinačnog plovila prema koordiniranom robotskom kolektivu. Umjesto da jedan operater upravlja jednom jedinicom, s kopna nadzire više bezposadnih površinskih i podvodnih vozila koja međusobno komuniciraju, samostalno raspodjeljuju zadaće i zajednički obrađuju zadano područje, pri čemu površinsko plovilo služi kao komunikacijska i energetska baza podvodnim jedinicama. Praktična je posljedica da se veće područje pretražuje brže, s manje angažiranih ljudi i bez posade na moru, dok operater zadržava nadzor i konačnu odluku.
Sustav se razvija u suradnji sa SeaSplit-om te uz potporu stručnjaka i istraživača iz hrvatske akademske zajednice, u međunarodnom timu iz Hrvatske, Engleske i Egipta. Pojedine su komponente već razvijene i provjerene, a ispitivanja u stvarnim uvjetima trenutačno se provode na lokacijama u Hrvatskoj i Egiptu. Integracija svih dijelova u jedinstven sustav kolektivne robotike predviđena je kao razvojna faza tijekom 2026. i 2027. godine — riječ je, dakle, o jasno označenom razvojnom smjeru, a ne o gotovom proizvodu.
Kao sljedeća javna demonstracija najavljena je vježba zajedničkog djelovanja bezposadnoga površinskog plovila i ronilice, na zadatku izvlačenja eksplozivnih sredstava i potrage za utopljenicima. O suradnji sa spasilačkim službama, kako se najavljuje, bit će više riječi u nadolazećem razdoblju.
Spasilačke službe, institucije i drugi zainteresirani za praćenje najavljene vježbe ili za suradnju pozvani su javiti se na info@autonomouscrafts.com.
D.G.




ŠOLTA – Već drugi dan traje opsežna potraga za 46-godišnjim austrijskim skiperom koji je u nedjelju ujutro pao u more

DUBROVNIK - Prava drama s sretnim završetkom odvijala se danas nešto prije 13 sati u moru ispred dubrovačkog hotela Rixos. Zbog

S obzirom da aktivnosti u okviru koordiniranog traganja za državljaninom Republike Austrije, koji je jučer ujutro nestao tijekom plovidbe kod

KARLOBAG / PAG – Staru pašku izreku „Čovik lavra i snuje, a bura odlučuje“ na vlastitoj je koži u četvrtak navečer osjetio
Jadranski web portal

© 2026 Morski HR. Powered by Ghost & Staticweb.dev




